
반응형
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 |
Tags
- 강화학습
- pandas
- TeachagleMachine
- selenium
- 사이드프로젝트
- 데이터분석
- 조코딩
- JavaScript
- 머신러닝
- Reinforcement Learning
- Instagrame clone
- 딥러닝
- 앱개발
- 리액트네이티브
- expo
- redux
- kaggle
- ReactNative
- clone coding
- 강화학습 기초
- Ros
- 클론코딩
- coding
- FirebaseV9
- python
- React
- 카트폴
- GYM
- 전국국밥
- App
Archives
- Today
- Total
qcoding
[Ros Web] rosapi를 활용한 Topic /Node List 받아오기 #3 본문
반응형
* 이 글에서는 ROS INTERFACE 생성 시 현재 사용중인 Topic 과 None 등 여러 정보를 받아오는 방법에 대해서 정리하였다. 현재는 Topic 과 Node만 받아왔지만 필요에 따라서 공식문서를 보면서 추가할 수 있다.
http://docs.ros.org/en/melodic/api/rosapi/html/index-msg.html
rosapi Msg/Srv Documentation
docs.ros.org
1) 구조
-> ROS Service를 이용하여, JSON 형태로 원하는 정보를 받아오는 구조를 띈다.
1-1) ros service
// Topic Service 생성
var topicsClient = new ROSLIB.Service({
ros : ros,
name : '/rosapi/topics',
serviceType : 'rosapi/Topics'
});
// Node Service 생성
var NodeClient = new ROSLIB.Service({
ros : ros,
name : '/rosapi/nodes',
serviceType : 'rosapi/nodes'
});1-2) Service request 생성 및 callback 등록
// 받은 정보를 담을 array 생성
let received_topic_list=[]
let received_node_list=[]
// Topic
var request = new ROSLIB.ServiceRequest();
topicsClient.callService(request, function(result) {
console.log("Getting topics...");
// reulst shape
// string[] topics / string[] types
// http://docs.ros.org/en/melodic/api/rosapi/html/srv/Topics.html
received_topic_list.push(result)
});
//Node
var request = new ROSLIB.ServiceRequest();
NodeClient.callService(request, function(result) {
console.log("Getting nodes...");
// reulst shape
// string[] publishers
// http://docs.ros.org/en/melodic/api/rosapi/html/srv/Publishers.html
received_node_list.push(result)
});
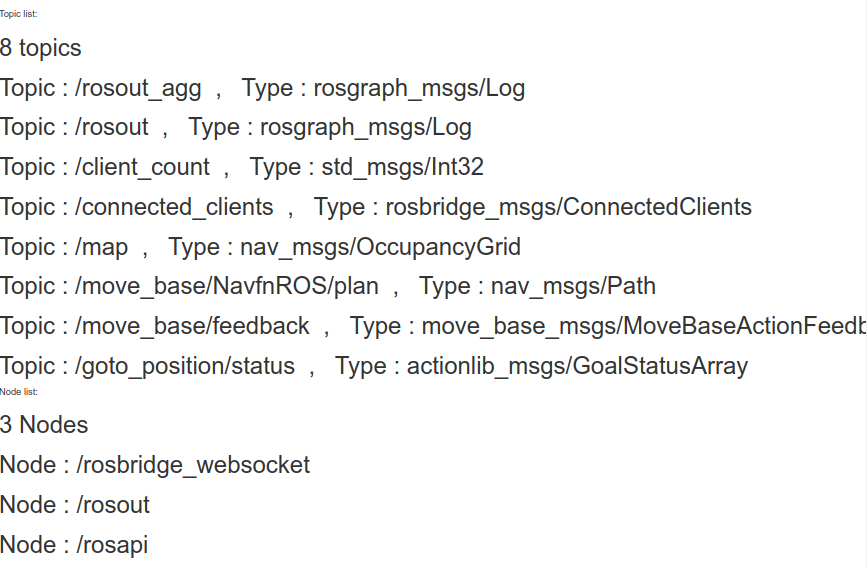
2) 받아온 정보를 UI 형태로 변경하기 위한 함수
--> 위에서 callService를 통해 받은 JSON 형태의 자료를 각각 received_topic_list / received_node_list 에 담아 두었으므로, 형태에 맞게 각각의 자료를 사용하면 된다. 이 때 HTML 에 표시 된 자리에 추가하여 넣기 위하여 h1으로 된 listComponent를 생성하고 list아래에 계속 추가하였다.
//Topic
// get srv msg
let topic_list=getTopics();
//set the topic list
const setTopicList=(topiclist)=>{
for (let i=0;i<topiclist.topics.length;i++){
let topic=topiclist.topics[i]
let type=topiclist.types[i]
document.getElementById("topic_list_length").innerHTML=`${topiclist.topics.length} topics`
let list = document.getElementById("topic_list");
let listCoponent = document.createElement('h1');
listCoponent.innerHTML=`Topic : ${topic} , Type : ${type}`
list.appendChild(listCoponent)
}
}
//Node
let nodeList=getNodes();
//set the topic list
const setPubList=(nodeList)=>{
for (let i=0;i<nodeList.nodes.length;i++){
let node=nodeList.nodes[i]
document.getElementById("node_list_length").innerHTML=`${nodeList.nodes.length} Nodes`
let list = document.getElementById("node_list");
let listCoponent = document.createElement('h1');
listCoponent.innerHTML=`Node : ${node}`
list.appendChild(listCoponent)
}
}HTML 코드
<p>Topic list:<h1 id="topic_list_length"></h1> <h1 id="topic_list"></h1></p>
<p>Node list:<h1 id="node_list_length"></h1> <h1 id="node_list"></h1></p>
전체코드
-> callback 되어 오는 정보를 받기 위해서 setTImeout 함수를 썻는 데, 좋은 방법은 아닌 것 같다. 보통은 정보를 받아올 때 Promise나 aync - await로 비동기 처리를 해줘야 하는 데 현재는 간단하게 만들기 위해서 setTimeout을 사용하였다. 정보를 Feching 후 promise를 받아와서 처리하는 것이 정확한 것으로 추후에 변경예정이다.
// srv array
let received_topic_list=[]
let received_node_list=[]
/////////////////////////////// Get Publisher list
const getNodes=()=>{
var NodeClient = new ROSLIB.Service({
ros : ros,
name : '/rosapi/nodes',
serviceType : 'rosapi/nodes'
});
var request = new ROSLIB.ServiceRequest();
NodeClient.callService(request, function(result) {
console.log("Getting nodes...");
// reulst shape
// string[] publishers
// http://docs.ros.org/en/melodic/api/rosapi/html/srv/Publishers.html
received_node_list.push(result)
});
return received_node_list
};
let nodeList=getNodes();
//set the topic list
const setPubList=(nodeList)=>{
for (let i=0;i<nodeList.nodes.length;i++){
let node=nodeList.nodes[i]
document.getElementById("node_list_length").innerHTML=`${nodeList.nodes.length} Nodes`
let list = document.getElementById("node_list");
let listCoponent = document.createElement('h1');
listCoponent.innerHTML=`Node : ${node}`
list.appendChild(listCoponent)
}
}
////////////////////////// Get Topic list
const getTopics=()=>{
var topicsClient = new ROSLIB.Service({
ros : ros,
name : '/rosapi/topics',
serviceType : 'rosapi/Topics'
});
var request = new ROSLIB.ServiceRequest();
topicsClient.callService(request, function(result) {
console.log("Getting topics...");
// reulst shape
// string[] topics / string[] types
// http://docs.ros.org/en/melodic/api/rosapi/html/srv/Topics.html
received_topic_list.push(result)
});
return received_topic_list
};
// get srv msg
let topic_list=getTopics();
//set the topic list
const setTopicList=(topiclist)=>{
for (let i=0;i<topiclist.topics.length;i++){
let topic=topiclist.topics[i]
let type=topiclist.types[i]
document.getElementById("topic_list_length").innerHTML=`${topiclist.topics.length} topics`
let list = document.getElementById("topic_list");
let listCoponent = document.createElement('h1');
listCoponent.innerHTML=`Topic : ${topic} , Type : ${type}`
list.appendChild(listCoponent)
}
}
setTimeout(()=>{
setTopicList(topic_list[0])
setPubList(nodeList[0])
},2000)정보를 받아온 화면
반응형
'Ros' 카테고리의 다른 글
| [Ros Web] Roslib , Ros2djs를 활용한 web interface 만들기 #2 코드설명 (0) | 2022.05.12 |
|---|---|
| [Ros Web] Roslib , Ros2djs를 활용한 web interface 만들기 #1 전체코드 (4) | 2022.05.12 |
| 3)[turtlebot_코드정리] navigation (0) | 2022.02.24 |
| 2)[turtlebot 코드정리] slam 코드 정리 (0) | 2022.02.24 |
| 1) [Turtlebot3 코드정리]gazebo를 통한 시뮬레이션 환경 (0) | 2022.02.24 |
'Ros' Related Articles
more



Comments